8051 wired robot, for robo race competion....
Discussion in "Project Addition or Changes" started by yooooo1089 Jan 22, 2012.


Sun Jan 22 2012, 09:11 pm
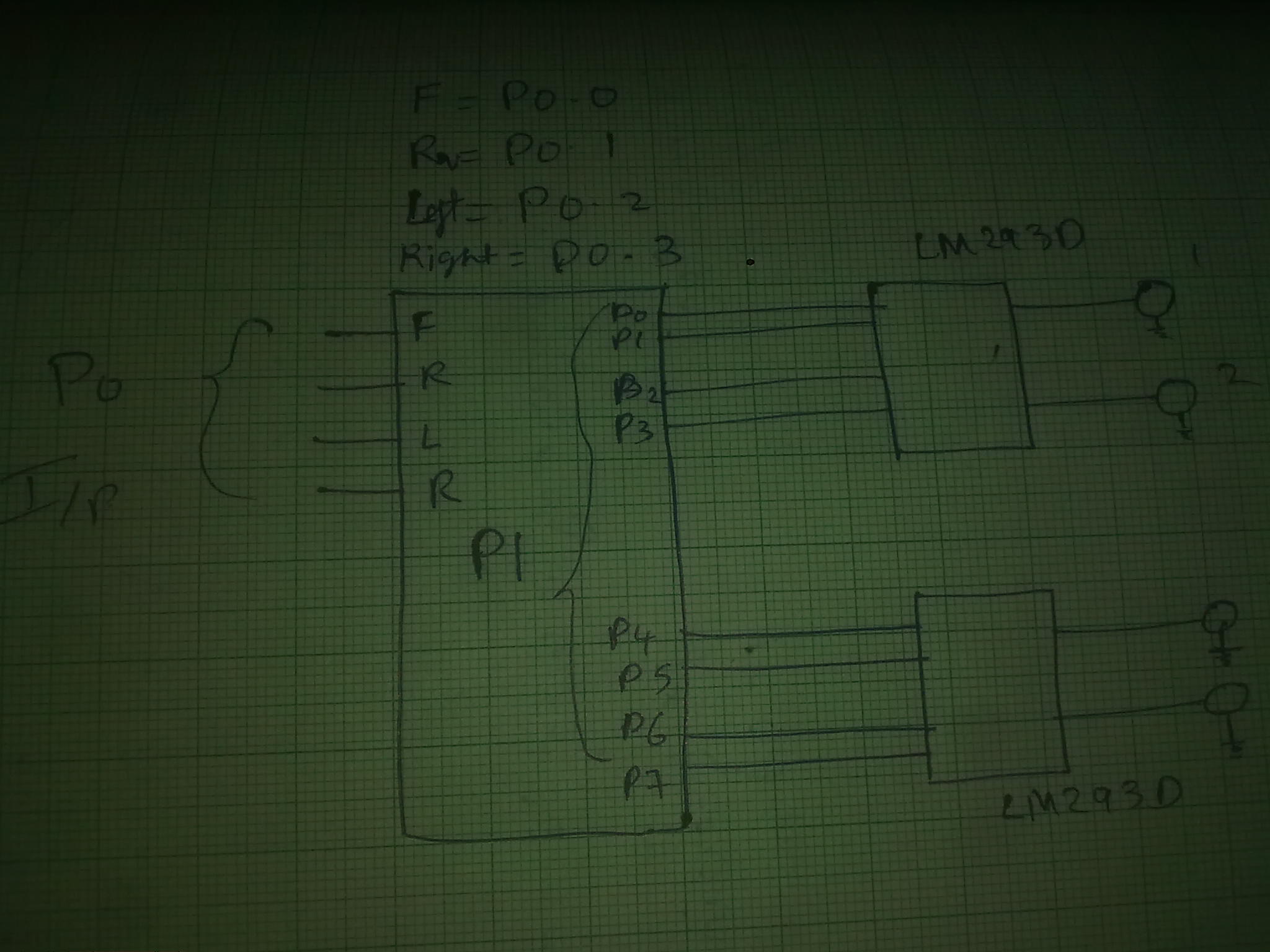
8051 is used in this project, and 2 motor driver{ LM293D }. 4 motors are connected to lm293d. 2 motors for each for lm293d.
Fordward---P0.0
Reverse----P0.1
left----------P0.2
right--------P0.3
OUTPUT------ i.e lm293d{ 2 ic} are connected to port 1.
When we press forward. Motor 1,2,3,4--revolve clockwise...
when we press reverse. Motor 1,2,3,4---revolve anti clockwise...
when we press left. Motor 3,4---revolve clockwise...
when we press right. Motor 1,2---revolve anti clockwise...
See the image to understand more..though image is not clear...
And hope yo find this thread usefull
-----y0!
This is the progrm....IT is in assembly..
// File Name:robot.1
// Author:pratik
// Date:17-1-1012
ORG 0
MOV P0,#0FFH
CHECK:JB P0.0,FORWARD
JB P0.1,REVERSE
JB P0.2,LEFT
JB P0.3,RIGHT
SJMP CHECK
FORWARD:MOV P1,#0AAH
JNB P0.0,STOP
SJMP FORWARD
REVERSE:MOV P1,#55H
JNB P0.1,STOP
SJMP REVERSE
LEFT:MOV P1,#00AH
JNB P0.2,STOP
SJMP LEFT
RIGHT:MOV P1,#0A0H
JNB P0.3,STOP
SJMP RIGHT
STOP:MOV P1,#00H
SJMP CHECK
END
Any dought of any ideas plz freely reply..
![]()
Fordward---P0.0
Reverse----P0.1
left----------P0.2
right--------P0.3
OUTPUT------ i.e lm293d{ 2 ic} are connected to port 1.
When we press forward. Motor 1,2,3,4--revolve clockwise...
when we press reverse. Motor 1,2,3,4---revolve anti clockwise...
when we press left. Motor 3,4---revolve clockwise...
when we press right. Motor 1,2---revolve anti clockwise...
See the image to understand more..though image is not clear...
And hope yo find this thread usefull
-----y0!
This is the progrm....IT is in assembly..
// File Name:robot.1
// Author:pratik
// Date:17-1-1012
ORG 0
MOV P0,#0FFH
CHECK:JB P0.0,FORWARD
JB P0.1,REVERSE
JB P0.2,LEFT
JB P0.3,RIGHT
SJMP CHECK
FORWARD:MOV P1,#0AAH
JNB P0.0,STOP
SJMP FORWARD
REVERSE:MOV P1,#55H
JNB P0.1,STOP
SJMP REVERSE
LEFT:MOV P1,#00AH
JNB P0.2,STOP
SJMP LEFT
RIGHT:MOV P1,#0A0H
JNB P0.3,STOP
SJMP RIGHT
STOP:MOV P1,#00H
SJMP CHECK
END
Any dought of any ideas plz freely reply..





Tue Jan 24 2012, 09:08 pm
stepper is good but robot might be slow  coz steppers are a bit slow compared to DC motors. good luck for your 4 wheel drive
coz steppers are a bit slow compared to DC motors. good luck for your 4 wheel drive 
coz steppers are a bit slow compared to DC motors. good luck for your 4 wheel drive Wed Jan 25 2012, 06:12 pm
Ya, i know, i was building it for robotrack competition where yo need seed very low...

Thu Feb 02 2012, 11:47 am
well u could have done it without using uc 8051 just by making a small remote (SPDT) switches..
Thu Feb 02 2012, 01:20 pm
Actually, THIS is my FIRST project in microcontroll, which i made by myself, so i thought i could upload it.
@Ajay i sorry NO breakthrough? yet! ,but i am working on it,by adding IR controller.
@Ajay i sorry NO breakthrough? yet!
,but i am working on it,by adding IR controller. Thu Feb 02 2012, 09:42 pm
@robotics_mait
Its a big thing for a starter hehe...
@yooooo1089
good job.. well i give you a suggestion.. to keep things simple.. why dont you make it controllable though PC? and more features later on..
Its a big thing for a starter
hehe...@yooooo1089
good
job.. well i give you a suggestion.. to keep things simple.. why dont you make it controllable though PC? and more features later on..
Powered by e107 Forum System

BartonSem
Thu Apr 18 2024, 04:56 am

DonaldKnown
Thu Apr 18 2024, 12:24 am

utaletxcyw
Wed Apr 17 2024, 10:21 am

Anthonyvab
Wed Apr 17 2024, 08:48 am

RobertCix
Wed Apr 17 2024, 06:46 am

Astorne
Tue Apr 16 2024, 08:52 pm

Williamjaf
Tue Apr 16 2024, 12:25 pm

best_yyPa
Tue Apr 16 2024, 09:42 am